|
CPSwarm at Glance |
|---|
|
| CPSwarm Vision
|
| Cyber-Physical Systems (CPS) find applications in a number of large-scale, safety-critical domains e.g. transportation, smart cities, etc. While the increased CPS adoption has resulted in the maturation of solutions for CPS development, a single consistent science of system integration for CPS has not yet been consolidated. Therefore CPS development remains a complex and error-prone task, often requiring a collection of separate tools. Moreover, interactions amongst CPS might lead to new behaviors and emerging properties, often with unpredictable results. Rather than being an unwanted byproduct, these interactions can become an advantage if explicitly managed at early design stages. CPSwarm tackles this challenge by proposing a new science of system integration and tools to support engineering of CPS swarms. CPSwarm tools will ease development and integration of complex herds of heterogeneous CPS that collaborate based on local policies and that exhibit a collective behavior capable of solving complex, industrial-driven, real-world problems. The project defines a complete toolchain that enables the designer to: |
|

|
| Model-centric design and predictive engineering are the pillars of the project, enabling definition, composition, verification and simulation of collaborative, autonomous CPS while accounting for various dynamics, constraints and for safety, performance and cost efficiency issues. CPSwarm pushes forward CPS engineering at a larger scale, with an expected significant reduction of development time and costs. Project results will be tested in real-world use cases in 3 different domains: swarms of Unmanned Aerial Vehicles and Rovers for safety and security purposes; autonomous driving for freight vehicles; and swarm logistics assistant (robots, rovers and drones that collaboratively perform opportunistic scanning of a given warehouse). |
| CPSwarm Concept
|
| CPSwarm is deployed around the conceptual architecture. A Models library collects formal repre-sentations of CPS subsystems, CPS base functions, security recipes, behaviour routines, swarm and self-organization algorithms, human-to-CPS interaction patterns, and forms the cornerstone upon which the project is founded. The library, which for example could be based on, and extend, the Modelio store, will be one of the first model libraries for designing swarms of CPS and will be one of the project outcomes beyond the current state-of-the-art. Building upon models in the library, the project partners will conceive and develop a design, simulation and performance prediction workbench, namely the CPSwarm Workbench, which will enable CPS engineers to collaborate and assemble model-based descriptions of CPS systems, with humans in the loop. |
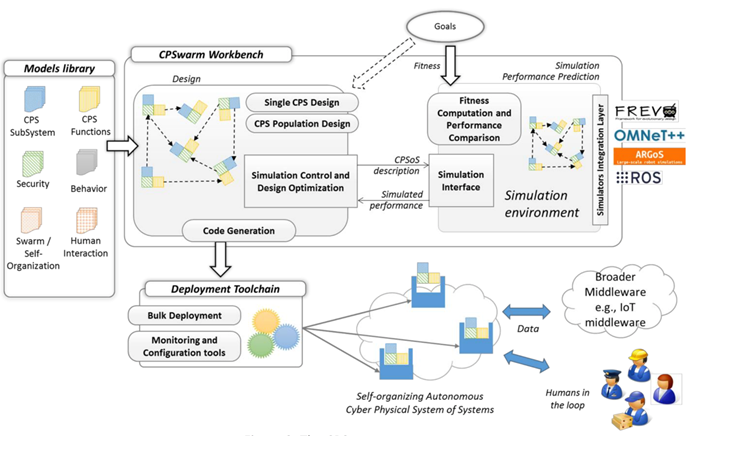 |
| More specifically, the CPS design workflow will be deployed as follows. After identifying the core CPS components needed for a solution, CPS engineers will exploit a library of customizable behavioural routines and self-organization algorithms (e.g., bird flock, ant colonies, etc.) to set-up swarms of CPSs that self-organize to solve the target problem, functionally acting as a unique Cyber Physical System of Systems – CPSoS. Depending on the se-lected organization mechanisms, different inter-CPS communication means will be available, and connectivity to higher-level middleware solutions will be supported, thus enabling integration in higher-level systems of systems.
|
| CPSwarm Methodology and Objectives
|
| CPSwarm faces the challenge of capturing effectively the industrial needs and innovation demands in defining a comprehensive toolchain to set-up collaborative and autonomous CPSs, able to provide massively deployable and reconfigurable solutions. In order to cope with such challenge, CPSwarm follows the hybrid research and innovation methodology depicted in the following figure. |
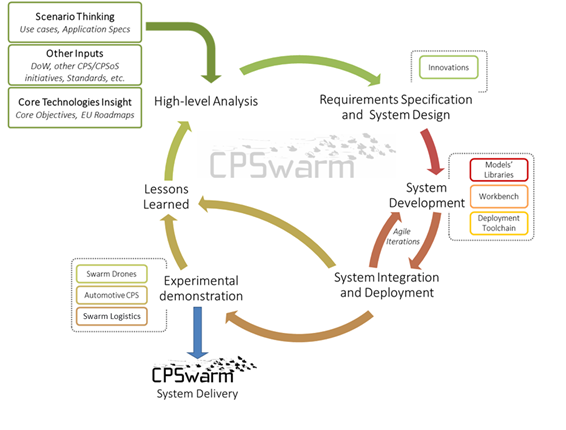 |
| The proposed methodology is built upon an iterative approach tailored to better bridge the gap between require-ment analysis/elicitation and development activities. According to the methodology, the process starts by collect-ing insight from several sources including project-specific requirements from the DoW, EU roadmaps and initia-tives, and relevant initiatives in the field of CPS and Swarm core technologies, e.g. linked research projects, rele-vant standards, etc.
|
CPSwarm Objectives: Drastically Improve support to design of complex, autonomous CPS. Drastically Improve support to design of complex, autonomous CPS. |
 Define a complete library of swarm and evolutionary algorithms for CPS design. Define a complete library of swarm and evolutionary algorithms for CPS design. |
 Provide a self-contained, yet extensible library of re-usable models for describing Cyber Physical Systems. Provide a self-contained, yet extensible library of re-usable models for describing Cyber Physical Systems. |
 Establish reference patterns and tools for integration of CPS artefacts. Establish reference patterns and tools for integration of CPS artefacts. |
 Enabling a sensible reduction in complexity and time of CPS development workflow by automating deployment. Enabling a sensible reduction in complexity and time of CPS development workflow by automating deployment. |
 Address real industrial needs in CPS design, with a particular focus on the autonomous robotic vehicles, freight vehicles and smart logistics domain. Address real industrial needs in CPS design, with a particular focus on the autonomous robotic vehicles, freight vehicles and smart logistics domain. |