Spiderino is a small and low-cost research robot based on the Hexbug Spider toy. It was built by replacing the robot head with a 3D-printed adapter which consists of two parts to provide space for sensors, a larger battery, and a printed circuit board (PCB) with an Arduino microcontroller, an ESP8266 Wi-Fi module, and a motor controller.
This thesis topic is concerned with the creation of a localization system for a swarm of Spiderino robots. The system will allow individual Spiderinos to calculate their own position in real-time. This information then can be used in a number of ways, including formation control, cooperative exploration or task coordination algorithms.
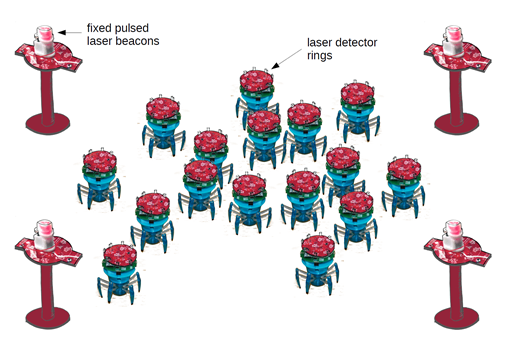
As it is illustrated in the picture above, fixed laser beacons, placed in known locations, continuously transmit coded information (binary sequences). Then, the detector rings on Spiderino robots can pick up these sequences to estimate their position.
The main task of this project is to modify and expand the existing software to perform the location estimation calculations.
Knowledge required: Basics of circuits design, Arduino pro mini microcontroller, programmable system-on-chip (Cypress 5LP) programming, Arduino C.
Location: Alpen-Adria-Universität, Klagenfurt, Austria.
Advisor and contact:
- Supervisor: Prof. Wilfried Elmenreich (wilfried.elmenreich@aau.at)
- Co-supervisor: Prof. Ahmet Şekercioğlu (asekerci@utc.fr)


